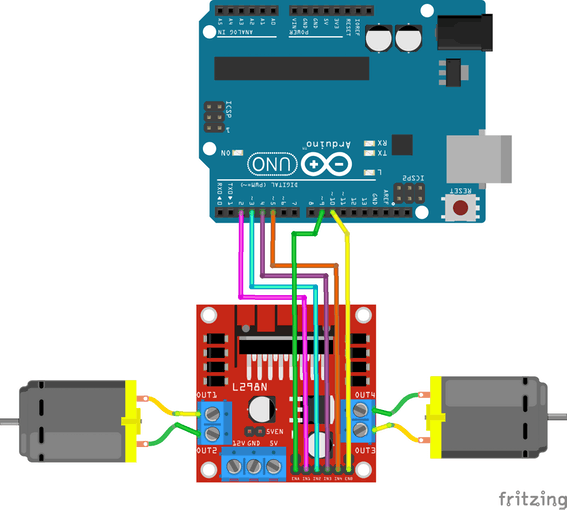
L298N modülünün pin bağlantıları aşağıdaki gibidir:
Motor A:
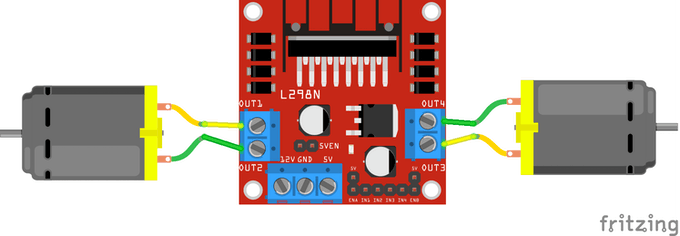
OUT1 ve OUT2 pinleri, birinci DC motorun uçlarına bağlanır.
IN1 ve IN2 pinleri, Arduino'nun dijital pinlerine (örneğin, pin 2 ve 3) bağlanır.
ENA pini, motorun hız kontrolü için PWM sinyali alır (örneğin, pin 9).
Motor B:
OUT3 ve OUT4 pinleri, ikinci DC motorun uçlarına bağlanır.
IN3 ve IN4 pinleri, Arduino'nun dijital pinlerine (örneğin, pin 4 ve 5) bağlanır.
ENB pini, motorun hız kontrolü için PWM sinyali alır (örneğin, pin 10).
Güç Bağlantıları:
+12V pini, 9V pilin pozitif ucuna bağlanır.
GND pini, pilin negatif ucuna ve Arduino'nun GND pinine bağlanır.
5V pini, Arduino'ya 5V güç sağlamak için kullanılabilir.
Not: ENA ve ENB pinleri üzerindeki jumper'lar çıkarılarak, bu pinlere PWM sinyali uygulanabilir.
Aşağıdaki kod, her iki motorun ileri ve geri yönde dönüşünü sağlar. Ayrıca, PWM sinyalleri ile motor hızları kontrol edilir.
int motor1pin1 = 2;
int motor1pin2 = 3;
int motor2pin1 = 4;
int motor2pin2 = 5;
void setup() {
pinMode(motor1pin1, OUTPUT);
pinMode(motor1pin2, OUTPUT);
pinMode(motor2pin1, OUTPUT);
pinMode(motor2pin2, OUTPUT);
pinMode(9, OUTPUT); // ENA
pinMode(10, OUTPUT); // ENB
}
void loop() {
// Hız kontrolü (0 = kapalı, 255 = maksimum hız)
analogWrite(9, 100); // Motor A hızı
analogWrite(10, 200); // Motor B hızı
// Motorları ileri yönde döndür
digitalWrite(motor1pin1, HIGH);
digitalWrite(motor1pin2, LOW);
digitalWrite(motor2pin1, HIGH);
digitalWrite(motor2pin2, LOW);
delay(3000);
// Motorları geri yönde döndür
digitalWrite(motor1pin1, LOW);
digitalWrite(motor1pin2, HIGH);
digitalWrite(motor2pin1, LOW);
digitalWrite(motor2pin2, HIGH);
delay(3000);
}
Bu kod, motorların 3 saniye ileri ve 3 saniye geri dönmesini sağlar. analogWrite fonksiyonu ile motor hızları ayarlanabilir.
L298N modülü, her motor için maksimum 2A akım sağlayabilir.
Modül, 5V ile 46V arasındaki motorları kontrol edebilir.
PWM sinyalleri ile motor hızları hassas bir şekilde ayarlanabilir.
Modül üzerindeki 5V regülatörü, Arduino'ya güç sağlamak için kullanılabilir.



.png)