Bu blog yazımızda Arduino Uno kullanarak engelden kaçan robot kiti nasıl yapılır, buna değineceğiz.
Engelden kaçan robot, üzerindeki sensör yada sensörlerle çevresini kontrol ederek, hareket halindeki aracın bu engellere çarpmasını engeller. Yazılımınıza göre kendi yolunu belirleyerek engellere çarpmadan yoluna devam eder. Hc-sr04 yada Mz80 gibi sensörler bu proje için idealdir. Biz projemizde hc-sr04 kullanacağız.
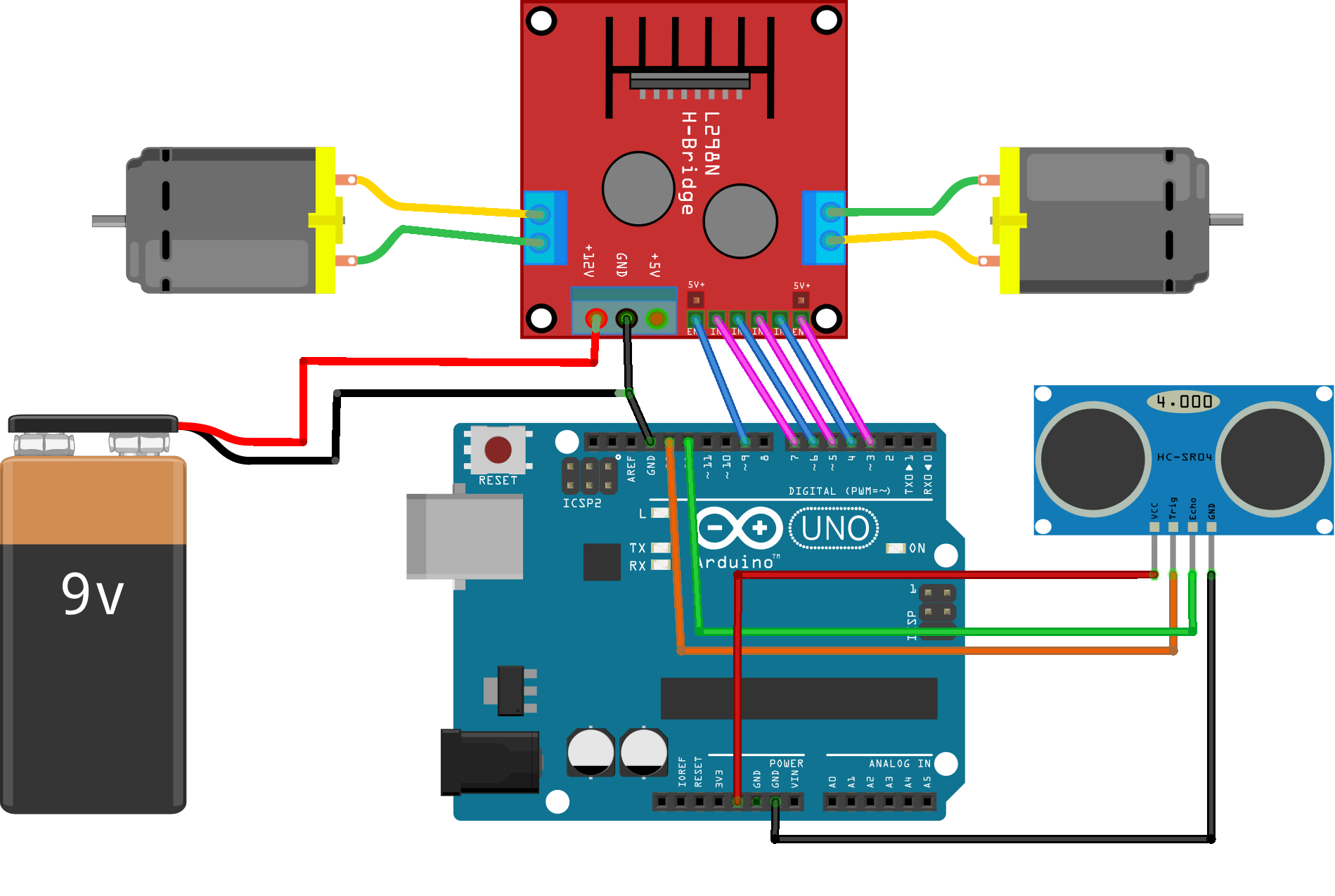
#define echoPin 12 //Ultrasonik sensörün echo pini Arduino'nun 12.pinine
#define trigPin 13 //Ultrasonik sensörün trig pini Arduino'nun 13.pinine tanımlandı.
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9 // Motor pinlerini tanımlıyoruz.
#define MotorL1 5
#define MotorL2 4
#define MotorLE 3
long sure, uzaklik; //süre ve uzaklık diye iki değişken tanımlıyoruz.
void setup() {
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW); //sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); //Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure = pulseIn(echoPin, HIGH); //ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik = sure / 29.1 / 2; //ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if (uzaklik < 15) // Uzaklık 15'den küçük ise,
{
geri(); // 150 ms geri git
delay(150);
sag(); // 250 ms sağa dön
delay(250);
}
else { // değil ise,
ileri(); // ileri git
}
}
void ileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void sag(){ // Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 0); // Sağ motorun hızı 0 (Motor duruyor)
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void geri(){ // Robotun geri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi pasif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi aktif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi pasif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi aktif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}



.png)