What is ESC?
The flight controller and motor are connected to each other with ESC. Since each brushless motor requires one, a quadcopter will require four ESCs. The ESC rotates the brushless motor using the signal from the flight control device and the power from the battery.
Brushless motors are more efficient, quieter, and have a longer lifespan due to less wear and tear. Brushless motors can also be made smaller and lighter, which is a significant advantage for next-generation unmanned aerial vehicles with ultra-portable designs.
ESC or Electronic Speed Controller, controls the electric motor by transmitting signals that change in speed and even reversing the direction of rotation. It uses a switching system with direct current to obtain an alternating three-phase current. This output current can then be changed by varying the speed of switching on and off of the switches. Brushless ESCs require information about the current position of the rotor to be able to start the motor and select a direction for rotation. To determine its position, the ESC uses information from the last electromagnet that is not energized to measure its induction.
How does ESC work?
ESC (Electronic Speed Controller) is a speed control device for a brushless DC motor. ESC requires a PWM signal to change the speed of a BLDC motor. ESCs are available in different models and power ratings. ESC is powered by an 11.1 V DC voltage from a LiPo battery. The control signal is provided from the drone flight control boards. The PWM signal (Pulse Width Modulation) is provided to the signal cables of the ESC. The flight control board measures specific parameters of the drone. ESC generates a three-phase alternating current to drive high current BLDC motors.
Factors to consider when choosing an ESC for your drone:
1. Current Rating
Current rating or amperage value is the first thing to consider when choosing an ESC. Motors draw current when they spin; if you draw more current than your ESC can handle, it will overheat and eventually fail. Once you've chosen a motor size that meets your requirements, you should decide on the current rating of the ESC.
Mostly, three things can increase the current draw of your ESC,
- Higher KV values of the motor
- Larger propellers (length and pitch)
- Larger motor size (stator width and height)
ESC has 2 current ratings, which are continuous and burst. The continuous current rating indicates the maximum continuous current that the ESC can safely handle. The burst rating means the maximum current that the ESC can handle for a short period (e.g., 10 seconds) without damaging itself.
2. Input Voltage Value
The voltage rating of the ESC is the maximum voltage amount that your ESC can safely handle. Some ESCs support 3S-4S battery voltage, while others can support 6S battery voltage. Check if they are compatible with the voltage of your LiPo battery. Using excessively high voltage to power your ESC will damage both the ESC and the motor.
3. Weight and Size
The weight and size of the ESC depend on the current rating of the ESC. It is challenging to make ESCs lighter and smaller without compromising their performance and effective cooling. Typically, individual standalone ESCs are designed to weigh around 4 grams to 6 grams, and 4-in-1 ESCs are designed to weigh around 12 grams to 15 grams. In general, lighter ESCs have lower heat dissipation, which leads to concerns about overheating.
4. ESC Firmware
The ESC manufacturer's firmware is the software that runs on each ESC. It determines the performance of the ESC. ESC device firmware provides information about configuration interface and supported protocols. There are different types of ESC firmware,
- BLHeli ESC.
- BLHeli_S ESC
- SimonK ESC
- KISS firmware
- BLHeli_32
Among these, BLheli firmware and Simonk firmware are open-source, and KISS firmware is closed-source, meaning it can only work with KISS ESC.
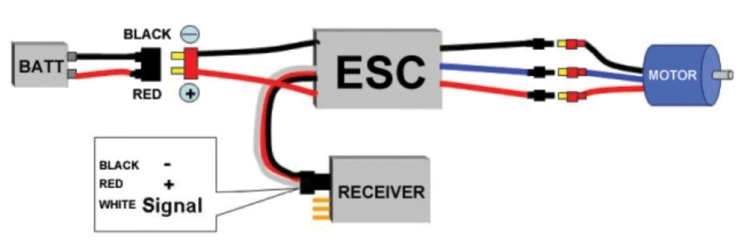
5. ESC Connection with the Motor
ESC uses a LiPo battery to provide power. The signal received from the flight control device controls the speed of the motor. A brushless ESC has 3 wires directly attached or soldered to the 3 wires of the motor.
6. ESC Protocols
Protocols are like the operating system of the ESC. They control how fast ESC and FC (flight controller) communicate, which plays a significant role in the operation and performance of a quadcopter.
7. ESC Processors
Most ESCs use processors from ATMEL, Silabs, and ARM Cortex. All these processors have different features and technical specifications, and support different device firmware.
- ATMEL 8-bit is compatible with both SimonK and BLHeli manufacturer firmware
- SILABS 8-bit is only compatible with BLHeli or BLHeli_S
- ARM Cortex 32-bit (e.g., STM32 F0, F3, L4) can work with BLHeli_3
This blog post covers the basics of ESC and how to choose the right one for your drone. Hopefully, this blog has helped you get started and select the best ESC for your project.
Below is a table that can give you some ideas about motor size.
| Propeller Size |
Stator Diameter |
Stator Height |
Motor KV |
ESC Size |
| 2" |
11 |
03-06 |
4000-8000 |
6-12A |
| 3" |
13-14 |
06-07 |
3000-4000 |
12-20A |
| 4" |
13-22 |
04-07 |
2400-2900 |
20A |
| 5" |
22-23 |
05-07 |
2200-2800 |
20-35A |
| 6" |
22-23 |
06-08 |
2200-2800 |
30-40A |
| 7" |
30+ |
06+ |
1800-2300 |
30A+ |



.png)