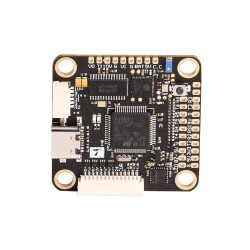
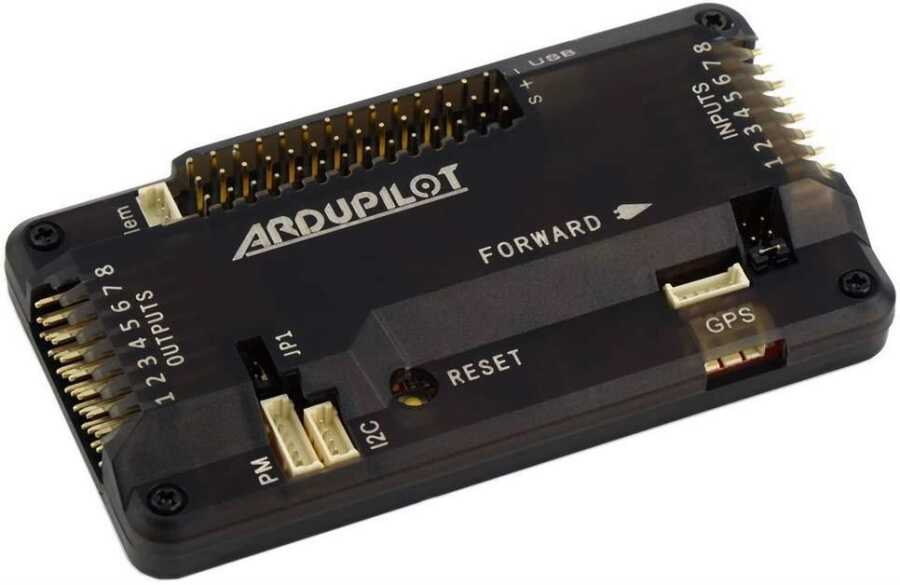
Ardupilot APM 2.8 Uçuş Kontrol Kartı
APM 2.8 otomatik pilot modülüdür. Kullanıcının sabit, döner kanatlı veya çok kanatlı bir aracı (hatta arabalar ve tekneler) tamamen özerk bir araca çevirmesini sağlar; yol işaretleri ile programlanmış GPS görevlerini gerçekleştirme yeteneğine sahiptir.
Programlama, günlükleri gözden geçirme, hatta akıllı telefonlar ve tabletler için çeşitli kullanıcı arayüzleri mevcuttur. İsteğe bağlı MAVLink telemetri radyosu, size tam kontrol sağlayan iki yönlü telsiz iletişimine izin verir ve bilgisayarınıza veya tabletinize canlı veri sağlar.
Sensörler APM2.6 ile tamamen aynıdır, ancak manyetik parazitleri önlemek için pusulanın güç ve motor kaynaklarından mümkün olduğunca uzağa yerleştirilmesi gereken araçlar (özellikle çok kesiciler ve geziciler) için tasarlanmış isteğe bağlı bir pusula vardır. Yerleşik pusulayı veya harici pusulayı bir atlama teli kullanarak kullanma seçeneği vardır. Pusula ile 3DR uBlox GPS ile kullanılmak üzere tasarlanmıştır, böylece GPS / Pusula ünitesi, APM'nin kendisinden gürültü kaynaklarından daha yükseğe monte edilebilir. APM 2.8, tam özerklik için bir GPS ünitesi gerektirir.
Yerleşik pusulayı kullanma
Dahili pusulayı kullanmak için, atlama telini aşağıda gösterildiği gibi bağlayın. Pusula atlama teli çıkarılırsa, APM kartı, harici olarak monte edilmiş GPS / pusula modülüne sahip multirotorlar için en iyi harici pusulayı kullanır.
Teknik Özellikler
- Arduino uyumlu
- Yüksek performanslı barometre ile birlikte 3 eksenli jiroskop
- İvmeölçer ve manyetometre içerir
- Onboard 4 MegaByte Otomatik veri kaydı için Dataflash çipi
- İsteğe bağlı harici GPS, Mediatek MT3329 V2 veya uBlox LEA-6H modülü kullanılabilir
- Barometrik basınç sensörü, Ölçüm Özellikleri'nden MS5611-01BA03'e yükseltildi
- Invensense'in 6 DoF İvmeölçer / Gyro MPU-6000'i kullanan ilk açık kaynaklı otomatik pilot sistemlerinden biri
- Önceden lehimli başlık pimleri
- Boyutlar: 44x70x15mm
- Ağırlık: 29g
APM Arducopter ile Neyi Kontrol Edebilirsiniz?








.png)