Stepper Motor Driver Card A4988
It is recommended to put fast diodes at the motor outputs to ensure smooth use of the driver and to prevent it from being easily affected by external factors. In this way, the reverse force returning from the motor cannot cause any damage to the driver.
Technical Specifications
A simple pitch and direction control interface
Five different pitch resolutions: Full step, Half step, Quarter step, Eighth step and Sixteenth step< /div>
Adjustable current control allows you to set the maximum current output with a potentiometer, which allows the stepper motor to use voltage above its rated voltage to achieve higher step ratios.
Smart commutation control automatically slows down the direct current selects the mode. (fast deceleration or slow deceleration)
There are thermal shutdown, low voltage and high current protections at over temperature.
Short circuit protection is available.
Driver, VDD and It requires a logic voltage source (3-5.5V) connected between GND pins and a motor power supply (8-35V) connected between VMOT and GND. The decoupling capacitors of these sources must be in appropriate proximity to the board, and these sources must be suitable for transmitting the expected currents (up to a maximum of 4A for the power supply).
* If voltage is coming to the driver, any wiring or motor connections must be Do not try it. You can cause serious damage to the drive. Disconnect the drive from power and then disconnect the motor connections etc. perform.
| MS1 |
MS2 |
MS3 |
Micro Resolution |
| LOW |
LOW |
LOW |
Full step |
| HIGH |
LOW |
LOW |
Half step |
| LOW |
HIGH |
HIGH |
Quarter step |
| HIGH |
HIGH |
LOW |
Step eight |
| HIGH |
HIGH |
HIGH |
Sixteenth step |
A4988 Arduino Connection
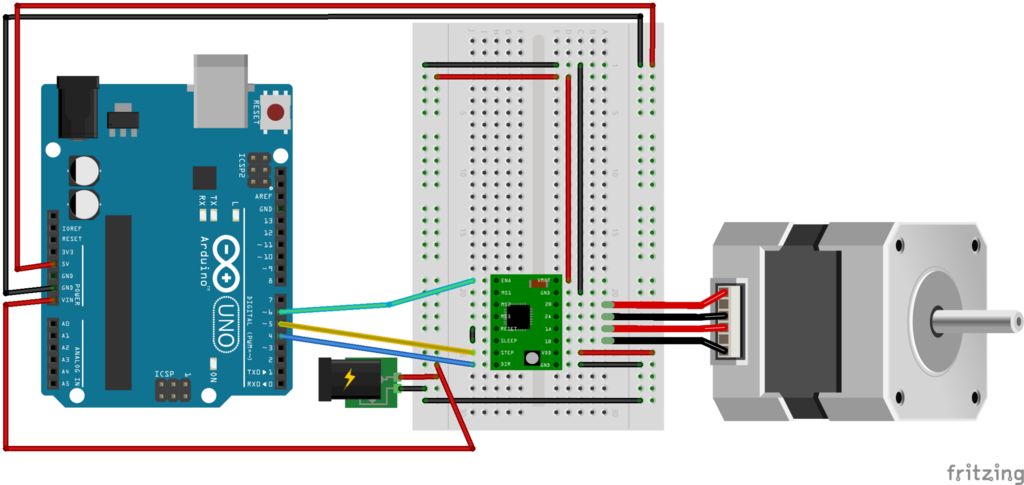





.png)